Prinsip saluran minyak
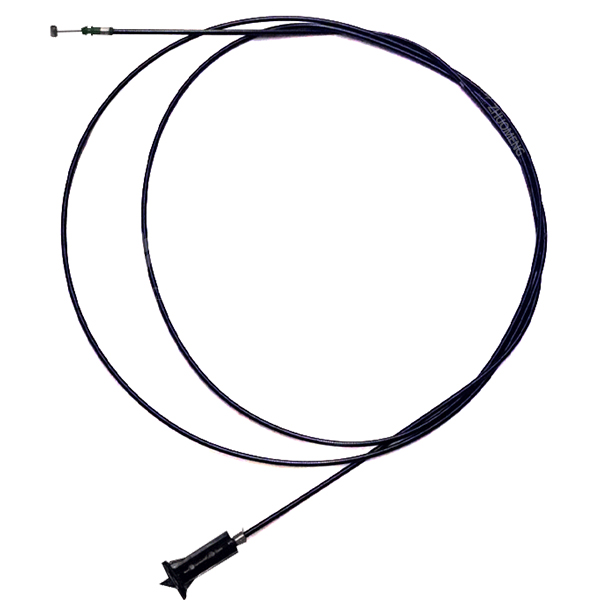
Pendikit dawai tarik tradisional disambungkan ke pedal pendikit melalui satu hujung dawai keluli dan injap pendikit di hujung yang lain. Nisbah penghantarannya ialah 1:1, iaitu, berapa banyak kita menggunakan kaki kita untuk memijak sudut terbuka pendikit adalah berapa banyak, tetapi dalam banyak kes, injap tidak sepatutnya membuka sudut yang begitu besar, jadi musim ini sudut terbuka injap tidak semestinya yang paling saintifik, walaupun cara ini sangat langsung tetapi ketepatan kawalannya sangat lemah. Dan pendikit elektronik ia melalui kabel atau abah-abah dawai untuk mengawal pembukaan pendikit, dari permukaan adalah untuk menggantikan talian pendikit tradisional dengan kabel, tetapi pada dasarnya bukan sahaja perubahan sambungan yang mudah, tetapi boleh mencapai fungsi kawalan automatik keseluruhan output kuasa kenderaan.
Apabila pemandu perlu memecut pemecut, sensor kedudukan pedal akan menerima isyarat melalui kabel ke ECU, ECU selepas analisis, penilaian, dan mengeluarkan arahan kepada motor pemacu, dan motor pemacu mengawal bukaan pendikit, untuk melaraskan aliran campuran mudah terbakar, dalam beban yang besar, bukaan pendikit adalah besar, ke dalam silinder campuran mudah terbakar lebih banyak. Jika penggunaan pendikit wayar tarik hanya boleh bergantung pada kaki untuk memijak kedalaman pedal pendikit untuk mengawal bukaan pendikit, sukar untuk melaraskan sudut bukaan pendikit untuk mencapai keadaan nisbah udara-bahan api teori, dan pendikit elektronik boleh melalui data sensor ECU yang dikumpul untuk analisis, perbandingan, dan mengeluarkan arahan kepada tindakan penggerak pendikit, pendikit ke kedudukan terbaik, Untuk mencapai beban dan keadaan kerja yang berbeza boleh hampir dengan nisbah udara-bahan api teori keadaan 14.7:1, supaya bahan api boleh dibakar sepenuhnya.
Sistem kawalan pendikit elektronik terutamanya terdiri daripada pedal pendikit, sensor anjakan pedal, ECU (unit kawalan elektronik), bas data, motor servo dan penggerak pendikit. Sensor anjakan dipasang di dalam pedal pemecut untuk memantau kedudukan pedal pemecut pada bila-bila masa. Apabila perubahan ketinggian pedal pemecut dikesan, maklumat tersebut akan dihantar ke ECU serta-merta. ECU akan mengira maklumat dan maklumat data daripada sistem lain, dan mengira isyarat kawalan, yang akan dihantar ke geganti motor servo melalui talian. Motor servo memacu penggerak pendikit, dan bas data bertanggungjawab untuk komunikasi antara ECU sistem dan ECU lain. Memandangkan pendikit dilaraskan melalui ECU, sistem pendikit elektronik boleh dikonfigurasikan dengan pelbagai ciri untuk meningkatkan keselamatan dan keselesaan pemanduan, yang paling biasa ialah ASR (kawalan cengkaman) dan kawalan kelajuan (kawalan pelayaran).